
O safbwynt strwythur swyddogaethol, mae gweithrediad y generadur gwactod yn bennaf yn falf rheoli electromagnetig i reoli'r generadur gwactod i wireddu cynhyrchu pwysau negyddol a stopio, er mwyn cyflawni'r swyddogaeth o ddenu a rhyddhau'r darn gwaith.
O ganlyniad, mae'r system yn gyffredinol yn cynnwys y cydrannau canlynol: 1. Ffynhonnell aer cywasgedig;2. Hidlydd;3. Newid falf solenoid;4. actuator gwactod;5. Cwpan sugno diwedd, bag aer, ac ati (Dangosir strwythur nodweddiadol yn y ffigur isod).
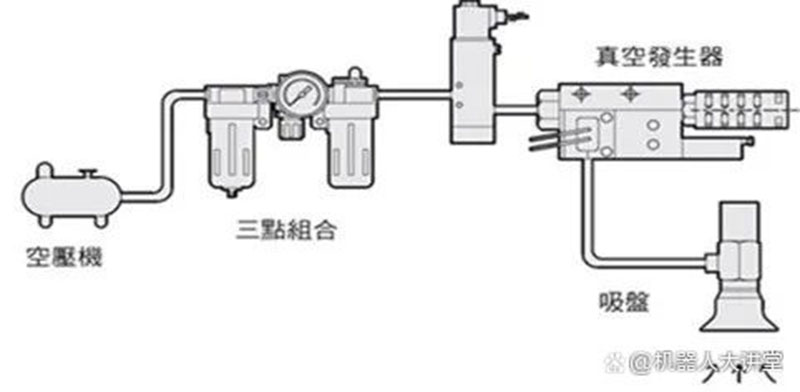
Yn ogystal, o dan ofynion awtomeiddio diwydiannol, er mwyn gwireddu monitro'r broses arsugniad gwactod, mae rhai gweithgynhyrchwyr yn gyffredinol yn ychwanegu cydrannau rheoli niwmatig megis mesuryddion llif, switshis canfod pwysau, a switshis agosrwydd i'r system yn y blynyddoedd diwethaf.
Fodd bynnag, gan fod y rhan fwyaf o'r cydrannau'n cael eu haddasu gan yr integreiddiwr yn unol ag anghenion cwsmeriaid ac amodau gwaith ar y safle, mae cymhlethdod y system gyfan yn aml yn uchel.
Ar yr un pryd, mae gweithgynhyrchwyr cydrannau lluosog yn arwain at waith gosod a chomisiynu cymhleth ar y safle, ac mae gan rai ohonynt ddefnydd uchel o ynni a dibyniaeth 100% ar ffynonellau nwy.Efallai na fydd integreiddio rhannol yn bosibl
Osgoi llygredd sŵn, sy'n golygu problemau annerbyniol ar gyfer amgylcheddau manwl uchel ac uchel-lân fel batris lithiwm a lled-ddargludyddion.
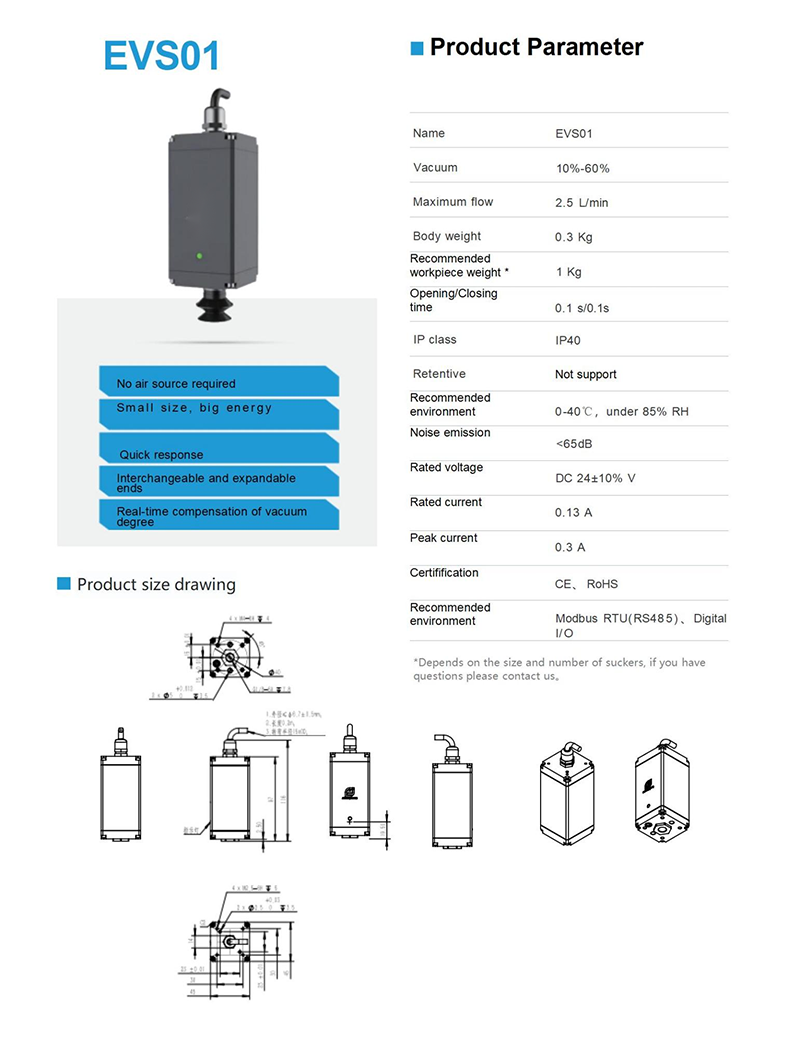
Ar y cyfan, mae EVS yn genhedlaeth newydd o actuator gwactod deallus trydan nad oes angen ffynhonnell aer cywasgedig ychwanegol, sy'n ddiamau yn drawiadol.
Mantais fwyaf y system arbed aer yw ei bod yn hawdd ei gosod.Oherwydd yn ddiamau, gall hyn leihau llawer o gydrannau ategol, gan gynnwys cywasgwyr aer, tanciau storio aer, offer puro aer, a phibellau allbwn, ac ati, gan wneud gwifrau'n haws ac yn fwy cyfleus a chlir i gwsmeriaid eu defnyddio.
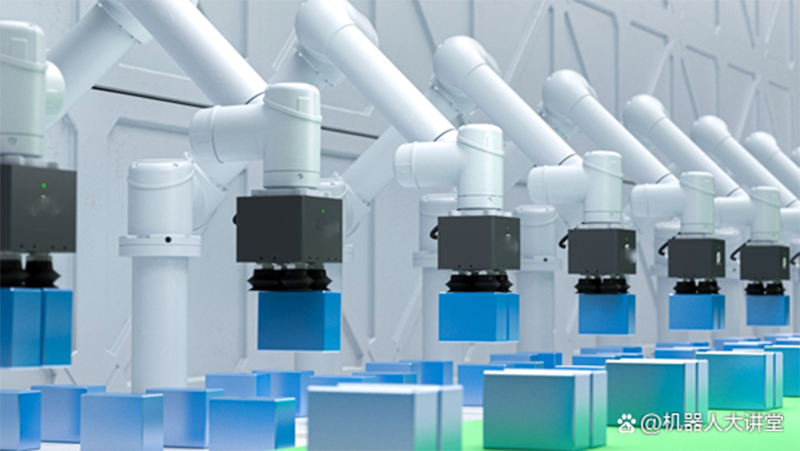
Adroddir bod gan lawer o olygfeydd ar hyn o bryd, gan gynnwys llwyfannau robot symudol, cynulliad electronig 3C, gweithgynhyrchu batri lithiwm, gweithgynhyrchu lled-ddargludyddion, logisteg cyflym, ac ati gynllun gofod cymharol gryno.
EVS08 batri sgwâr sugno
Mwy o fanylion a manteision
Dysgodd y neuadd ddarlithio robotiaid y gall y cynnyrch hwn, sy'n edrych yn fach iawn ac yn pwyso dim ond 2.5kg, gyrraedd lefel uchel o 10kg.Oherwydd y dyluniad foltedd isel 24V, y defnydd o ynni yw 20% o'r system niwmatig draddodiadol, a gellir gosod ac addasu'r grym arsugniad ar y diwedd, a gall y grym arsugniad gyrraedd 102-510N.
O ran dyluniad strwythurol, mae EVS yn mabwysiadu dyluniad strwythurol mwy cryno ac ysgafn, sy'n gwneud EVS 30% yn llai nag aerodynameg traddodiadol ar gyfer yr un pwysau o lwyth.
Ar yr un pryd, gellir ei gysylltu'n uniongyrchol â'r cysylltydd ar ddiwedd y fraich robotig, sy'n lleihau cydrannau ategol segur, yn ei gwneud yn fwy hyblyg i'w defnyddio, yn gallu cael eu defnyddio'n gyflym, a gallant amsugno gwrthrychau mawr lluosog yn hawdd, yn arbennig o addas ar gyfer stacio, trin a gweithrediadau golygfa eraill .
Er mwyn gwella hwylustod y defnydd, mae gan yr actuator gwactod trydan hefyd ryngwyneb integredig, y gellir ei ddefnyddio i reoli a monitro'r broses gyfan o adsorbio gwrthrychau.
Adroddir bod hyn er hwylustod cwsmeriaid i reoli gradd gwactod y actuator gwactod drwy gyfarwyddiadau, a hefyd gysylltu drwy'r cyswllt IO ar gyfer monitro a chynnal a chadw rhagfynegol y broses arsugniad.Bydd monitro statws yn lleihau gwallau ac amser segur ac yn sicrhau bod y system ar gael.
Ar y sail hon, mae manteision a nodweddion EVS hefyd yn cael eu hadlewyrchu yn y pwyntiau canlynol:
1. Strwythur cryno a phwysau ysgafn: mae EVS 30% yn llai na'r maint niwmatig traddodiadol wrth amsugno'r un pwysau o lwyth.Gellir ei gysylltu â'r cysylltydd ar ddiwedd y fraich fecanyddol i wireddu amsugno'r llwyth, yn arbennig o addas ar gyfer pentyrru, trin a gweithrediadau golygfa eraill;
2. Cyfluniad terfynell helaeth: Gellir ffurfweddu gwahanol fathau o gwpanau sugno, bagiau aer a chydrannau eraill i wireddu gafael ar wahanol wrthrychau, gan gynnwys cydrannau sgwâr, sfferig a siâp arbennig;
3. Gellir rheoli sianeli deuol yn annibynnol: rheoli ochr chwith a dde'r actuator gwactod yn hawdd, ac mae'r ddwy ochr yn annibynnol ar ei gilydd, gan wella effeithlonrwydd gweithio'r llinell gynhyrchu ymhellach.Mae'n sylweddoli sugno a lleoliad ar yr un pryd, sy'n hwyluso trin a didoli gwrthrychau yn fawr, gan arbed lle ac amser;
4. Sugnedd addasadwy: gellir addasu graddau'r gwactod yn ôl nodweddion y cynnyrch sugno, a gellir gwireddu iawndal gwactod amser real;
5. Adborth statws: Mae ganddo synhwyrydd adborth gwactod, a all ganfod statws arsugniad gwrthrychau mewn amser real, a darparu adborth a larwm;
6. pŵer-oddi ar amddiffyn: Ar ôl pŵer-off, gall wireddu arsugniad pŵer-oddi ar hunan-gloi i amddiffyn y gwrthrychau adsorbed;
7. Addasrwydd cryf: cefnogi protocol cyfathrebu 24V I/O a MODBUS RTU (RS485);
8. Hawdd i'w osod a'i ddadfygio: mae'r protocol cyfathrebu yn syml ac yn ddarllenadwy, sy'n lleihau'n fawr yr anhawster o ddadfygio.Yn ogystal, gellir atodi meddalwedd dadfygio'r cyfrifiadur gwesteiwr fel anrheg, y gellir ei osod a'i olygu i osod paramedrau swyddogaeth all-lein.
Casgliad a'r dyfodol
O dan y duedd o awtomeiddio a deallusrwydd, mae actiwadyddion gwactod trydan wedi dod yn gynyddol yn elfen allweddol i sicrhau gweithrediad arferol robotiaid a systemau awtomeiddio, gan wneud y defnydd o systemau actuator trydan yn fwy cyfleus a hawdd i'w defnyddio, a gallant gwrdd â senarios mwy amrywiol megis robotiaid cyfansawdd symudol..
Gall y rhyngwyneb integredig a chyfluniad terfynell cyfoethog ac optimeiddiadau eraill wella dibynadwyedd cydrannau allweddol y robot ymhellach, lleihau stopiau cynhyrchu a phroblemau lleoli o bell i ddefnyddwyr terfynol, a lleihau costau cynnal a chadw ac ôl-werthu ymhellach.
Amser post: Ebrill-19-2023